
四足放牧机器人已装上“慧眼”
近日,中国农业科学院农业信息研究所科学数据研究室利用新一代信息技术,成功研制出肉牛行为识别轻量化模型MASM—YOLO,实现了对肉牛六类典型行为的快速精准识别,有效提升了牛群饲养管理效率。相关研究成果发表在《农业计算机与电子》(Computers and Electronics in Agriculture)上。
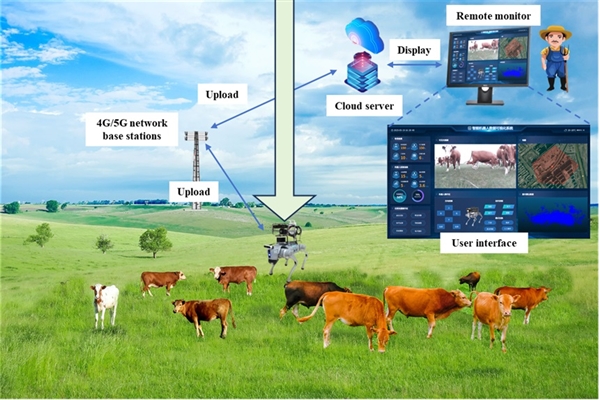
MASM-YOLO模型应用场景。中国农科院供图
研究团队面向天然草原野外自由放牧场景,在研发四足放牧机器人过程中,针对光照变化剧烈、背景环境复杂、牛只群体遮挡以及运动模糊等关键问题,创新提出了融合多尺度特征提取、自适应检测与轻量化骨干网络等技术的深度学习模型MASM-YOLO。
该模型实现了站立、躺卧、吃草、饮水、回舔和吮吸等肉牛典型行为的快速识别,并在识别精度与计算效率之间取得了最优协同,有效提升了疫病诊断、发情监测、产犊预警和健康评估等牛群饲养管理效率。该技术的突破不仅为四足机器人安装了“慧眼”,也为全面创制放牧机器人提供了关键技术支撑。
该研究得到国家重点研发计划、中国农业科学院农科英才领军人才等项目支持。
相关论文信息:https://doi.org/10.1016/j.compag.2025.111329
信源地址:/html/shownews.aspx
| 分享1 |
版权声明
本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。
| 相关资讯 |
| 图片资讯 | 更多 |



 Copyright © 2014 北京今日创见科技有限公司 All Rights Reserved.
Copyright © 2014 北京今日创见科技有限公司 All Rights Reserved.
关于我们 | 网站声明 | 服务条款 | 联系方式
京ICP备 14047472号-1 京公网安备 11010502030844号
京公网安备 11010502030844号
| 一周资讯排行 | 更多 |
关于我们 | 网站声明 | 服务条款 | 联系方式
京ICP备 14047472号-1
京公网安备 11010502030844号